iDFusion: Globally Consistent Dense 3D Reconstruction from RGB-D and Inertial Measurements.
Dawei Zhong*, Lei Han*, Lu Fang.
InProceedings of the 27th ACM International Conference on Multimedia. 2019 Oct 15.


Introduction
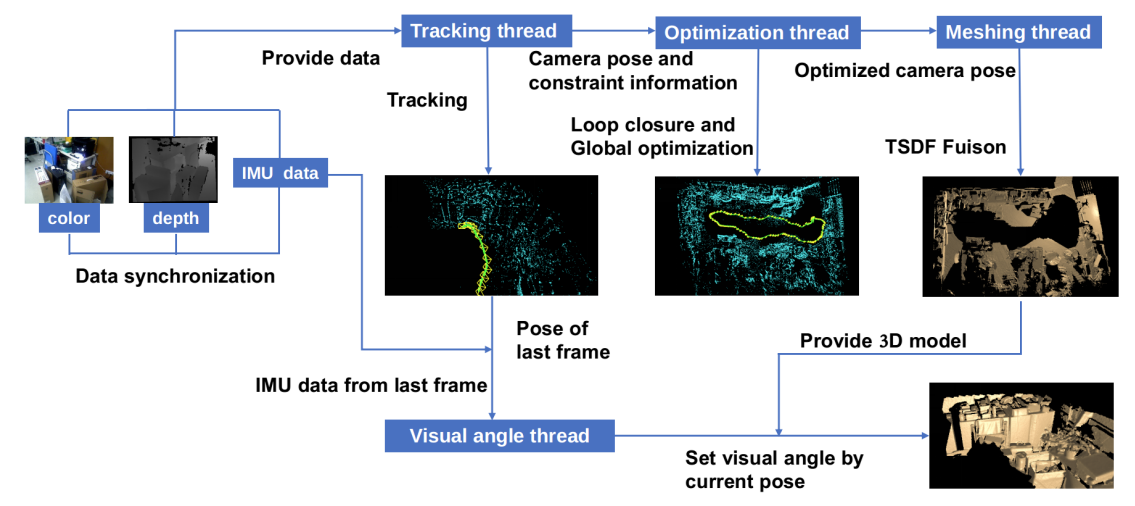
We present a practical (fast, globally consistent and robust) dense 3D reconstruction system, iDFusion, by exploring the joint benefit of both the visual (RGB-D) solution and inertial measurement unit (IMU). A lobal optimization considering all the previous states is adopted to maintain high localization accuracy and global consistency, yet its complexity of being linear to the number of all previous camera/IMU observations seriously impedes real-time implementation. We show that the global optimization can be solved efficiently at the complexity linear to the number of keyframes, and further realize a real-time dense 3D reconstruction system given the estimated camera states.
Citing
If you find our code useful, please kindly cite our paper:
@inproceedings{zhong2019idfusion,
title={iDFusion: Globally Consistent Dense 3D Reconstruction from RGB-D and Inertial Measurements},
author={Zhong, Dawei and Han, Lei and Fang, Lu},
booktitle={Proceedings of the 27th ACM International Conference on Multimedia},
pages={962--970},
year={2019}
}